工业互联网+数字技术实验室在占地400平,主要设备包括,AGV移动机器人平台、UR3、UR5机器人,ABB双臂Yumi机器人以及机器视觉实验平台和学院老师自主研发设计的工业机器人。工业互联网实施与运维工作站这些设备主要服务于机电工程专业、机械工程专业、智能制造工程专业和机制专业。开设的机器人相关课程、机器视觉相关课程和传感器相关课程的相关实验。
工业互联网实施与运维工作站主要面向工业云平台和工业互联网运用,学生通过该工作站,对工业现场数据进行采集、数据上云平台以及数据模型建立和边缘数据处理等相关的项目训练,来提升工业互联网实施与运维的相关技能。
ABB Yumi主要面向学生开设双臂机器人轨迹规划实验以及双臂机器人编程实验,ABB Yumi双臂机器人主要支撑我院相关专业开展基于机器视觉的扑克牌分类双臂结束实验项目,双臂机器人轨迹规划实验项目,以及双臂机器人编程实验项目。
智能制造数据采集与控制系统实验平台
智能制造数据采集与控制系统由分布式数据采集系统(下位机)、过程监控与管理系统(上位机)、数据通信网络三个部分组成。智能制造数据采集与控制系统实验平台依据典型SCADA系统架构而设计,由智能传感器、电机驱动控制系统、PLC组成下位机系统,计算机与SCADA软件及其驱动程序、数据库软件构成上位机系统,Modbus、Profibus、Devicenet、Profinet、Internet等诸多协议接入构成实验平台的网络传输系统。通过多种方式从底层的传感器、变频与伺服驱动系统、PLC以及各类智能设备采集数据,并通过SCADA系统对采集数据进行存储、调用、分析、管理以及可视化展示,实现现场设备的安全生产、调度、管理、优化和故障诊断。同时平台业可以将采集的数据重新整合后,以行业标准协议或业务系统接口推送到制造执行系统(MES)、企业资源计划系统(ERP)和互联网云端,以便于进行更加深入的数据分析与管理。

图智能制造数据采集与控制实验平台
实验平台主要应用于智能制造工程、自动化、机电工程、机器人工程类专业,过程控制、运动控制方向、工业互联网方向、智能化工厂生产管理等实验课程,可开展电气控制与PLC应用、变频与伺服电机驱动技术、现场总线及应用、传感器与检测技术、数据采集与监视控制系统、MES系统基础、MES系统二次开发等课程的配套实验。
ABB Yumi双臂智能协作机器人
ABB Yumi双臂智能协作机器人具有TrueMove和QuickMove运动控制技术的五代集成IRC5控制器,控制器可控制命令准确性、速度、循环时间、可编程性和外部设备的同步。I/O接口包括以太网IP、Profibus、USB端口、DeviceNet™、通信端口、紧急停止和空对空。YuMi接受各种各样的HMI设备,包括ABB的教学挂件、工业显示器、市售的平板电脑和智能手机。100-240伏的电源插头插入任何电源插座,全球通用性。
ABB Yumi主要面向学生开设,双臂机器人轨迹规划实验以及双臂机器人编程实验,ABB Yumi双臂机器人主要支撑我院相关专业开展基于机器视觉的扑克牌分类双臂结束实验项目,双臂机器人轨迹规划实验项目,以及双臂机器人编程实验项目。

图 ABB Yumi双臂智能协作机器人
UR协作机器人
UR协作机器人是灵活、轻型和柔性的六关节工业机器人,具有灵活性的自动化方案。其优势为轻自重,它不需要坚固的重型底座,而且可以方便地移动和安置。UR协作机器人编程简单,适用于工业机器人编程教学,系统支持ROS系统,相关代码由ROS-I提供并维护。
UR协作机器人主要开展协作机器人示教编程实验、协作机器人运动控制实验以及协作机器人轨迹规划实验等。

图UR协助机器人
工业互联网实施与运维工作站
工业物联网实施与运维工作站主要面向工业云平台和工业互联网运用,学生通过该工作站对工业现场数据进行采集,数据上云平台,以及数据模型建立和边缘数据处理等相关的项目训练,来提升工业互联网实施与运维的相关技能。
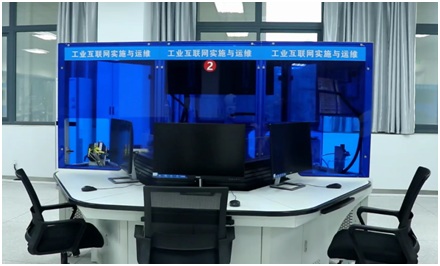
图工业物联网实施与运维工作站
模块化机器人手臂
模块化机器人手臂由“机器人关节伺服电机Actuatic”和金属结构件连接、拼装而成,模拟人类手臂运动。手臂有7个运动关节,每个关节由1个伺服电机驱动,可根据实际需要配置机器人末端执行器,用以模拟工业机器人完成工业生产任务。

图机器人手臂
此设备主要应用于机器人工程、智能制造工程、人工智能等相关专业理论与实践教学,以及科研活动,需要掌握“运动学、动力学及控制”等理论知识。机器人各关节伺服电机通过RS485总线串接,经过RS485/USB信号变换与PC通讯。使用者利用Matlab等工具计算出各伺服电机的运动参数,通过伺服电机UI设置各电机工作状态,并在UI窗口实时在线监控、修改。使用者亦可利用一维弦科技自主研发的机器人操作系统EwayOS,以及开放协议的嵌入式运动控制器,构建智能运动控制系统,利用EwayOS提供的开发、教学工具包MoRo Studio编写程序,控制机械手臂完成实际任务,进行机器人正逆运动学、运动控制、运动规划等算法研究。
开放、标准的通信接口,支持与常见的第三方设备快速集成,如工业相机、智能编码器、PLC、SCADA系统等,方便使用者进行智能制造系统集成应用设计。
机器人移动底盘
机器人移动底盘Tyran是智能AGV小车的系统结构模型,也是智能机器人移动机构的基础。产品秉承开放式系统理念设计,以国内自主知识产权的智能机器人操作系统EwayOS为核心,提供丰富的软硬件接口。使用者可以利用Tyran设计自己的机器人系统,进行结构研究、控制研究、算法研究,以及各种场景下的应用实验。

图机器人移动底盘
Tyran主要应用于高校智能制造工程专业实践教学以及开展机器人工程、人工智能技术相关实验与科研活动,产品系统结构开放、协议开放,支持二次开发。使用者可根据自己的需求任意添加或修改机械结构、电控系统、传感器组件。Tyran配置有超声波传感器、IMU、RGB-D摄像机,预装了EwayOS操作系统的机器人主控计算机、运动控制器(嵌入式)。通过TCP/IP协议与外部系统通讯,通讯协议开放,能够与市面上任意的第三方设备进行通信交互。同时还配置了激光雷达,与视觉传感器配合实现SLAM导航、V-SLAM导航、自主定位与运动规划,并提供相应的参考算法。产品同时兼容ROS系统,用户可使用ROS系统进行自主开发、实践与研究。

制造执行系统(MES)平台
制造执行系统(Manufacturing Execution System)是制造业信息化领域内面向车间层的管控系统,系统介于ERP(企业层)和自控系统(单元层)之间,在生产制造系统中起着承上启下,提高企业运作效率和管理水平的作用,是管控一体化的桥梁。
制造执行系统(MES)实验平台以智能制造机加工生产线仿真系统为数据采集对象,通过虚拟化的方式模拟出实际工厂的个性化订单生产,包含:首工位(启动工单,开始零配件装配)、中间工位(零配件装配并报工)、检测工位(检测整车的质量)等虚拟工位。实现生产管理的“精细化”和“智能化”的虚拟仿真,通过仿真系统可以让学生在角色扮演的过程中体会到柔性制造的概念与特点;对制造执行系统的功能结构及应用有一定的认知,为后期的制造执行系统的学习与开发打下坚实的基础。
同时,实验平台开放式的通信接口,能够直接与智能制造数据采集与系统实验平台的SCADA系统进行连接,也可以与连接至三期建设的工业云与大数据处理中心,将生产管理数据传送至云端进行人工智能化分析处理。
实验平台能够对智能制造工程、机器人工程、工业机器人技术等智能工程类专业的制造执行系统(MES)技术基础、制造执行系统(MES)应用开发、数字化工厂生产现场管理、生产设备智能化管理与维护等相关课程进行实验支持。
 书记信箱
书记信箱